




What is "Quad-maran automated vessel"?
Research and Development, Since April 2015

・船として多胴船は安定すること。
・四胴の間から計測機器を水面下に下ろすことができること。
・各胴が独立して回転機構を有しているために、「直角航行」できるということ。
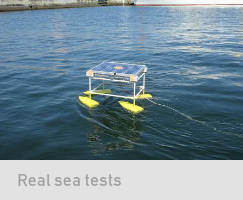
写真は2015年の4月からの実験の様子である。波の中でも計測機器部分が出来るだけ揺れない機構を生み出すことができた。
四胴は干渉する流体力があるので十分に調査する必要がある。2015年度は推進抵抗についても簡単に調査している。また実海域においても推進性能を調べた。太陽光パネルを釣付けたりすることで電力消費がどれくらい抑えられるか基本的なことについて調べた。
本開発研究は平成27年度神戸市挑戦企業等支援補助金の一環として日本海工㈱と共同で実施したものであることを付記する。

Crafting Pilot Demo Quad-maran Vessel, since 2016

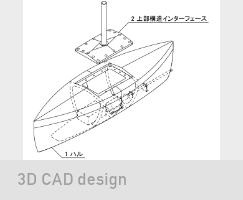
必要排水量を定めた後、船体形状を色々と検討した。船体形状はできるだけ細い方が抵抗が小さいため、必要排水量下において出来るだけ細い船体形状を選択した。
船体はGFRPで製作している。水圧や曲げ荷重を考慮してGFRP船体の必要板厚を決めている。
2017年1月17日製作を依頼している㈱GHクラフト本社にて引き渡し式を無事に終えた。
2016年度の研究は日本海工㈱との共同研究として実施した。また詳細設計、製作に関しては㈱GHクラフトとの共同実施である。FRP製作は㈲マルセンクラフトにて実施した。


Outcome in 2017

・開発した船体の四胴ロボット船の推進抵抗を詳細に調査すること。これはバッテリーのスペックを決めるためにとても重要となる。また活動可能時間もこれにより明らかになる。
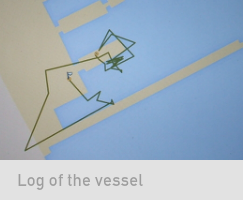
・四胴ロボット船の操縦性能を明らかにすること。これは定点保持や自動航行にとってとても重要となる。
・自立航行を可能とさせること。研究開発は3年計画であり、最終的には湾における養殖場で様々な活動ができるようにしたいと思っている。



